アブストラクト (または 抄録)
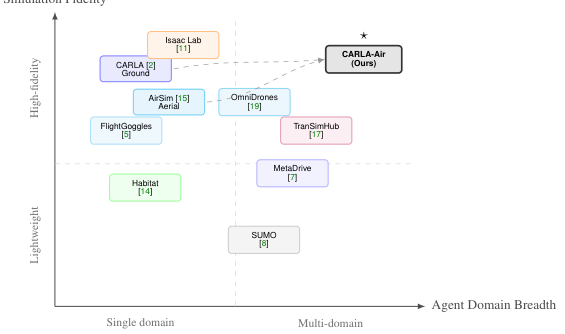
低高度経済、具現化された知能、および空地協働システムの収束は、単一で物理的に一貫性のある環境内で空域および地上のエージェントを共同でモデル化できるシミュレーションインフラストラクチャに対する高まるニーズを生み出している。既存のオープンソースプラットフォームは、特定のドメインに留まっている。都市運転シミュレータは豊かな交通を提供するが空域力学は提供せず、一方マルチローターシミュレータは物理学的に正確な飛行を提供するものの、リアルな地上シーンが不足している。
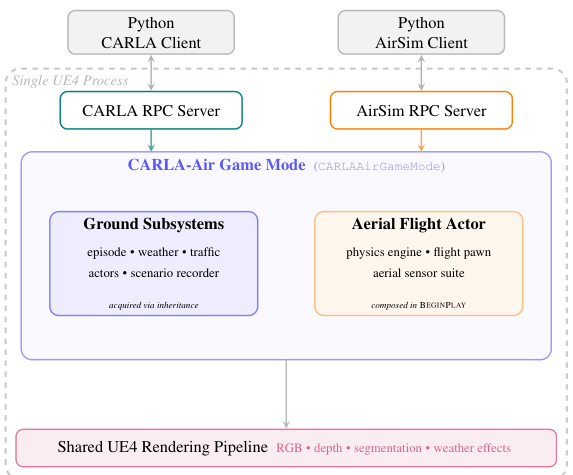
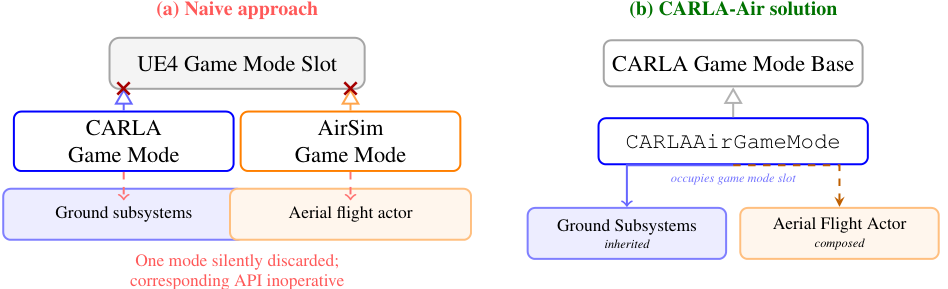
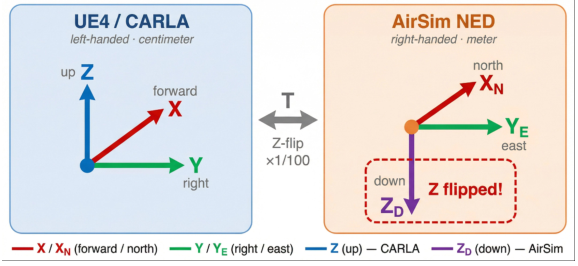
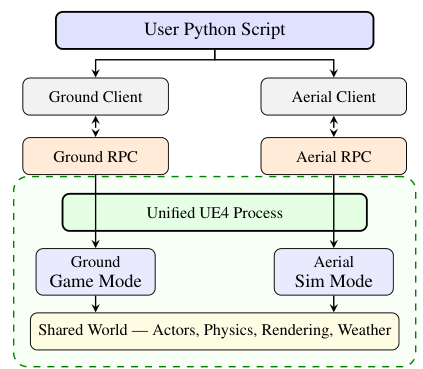
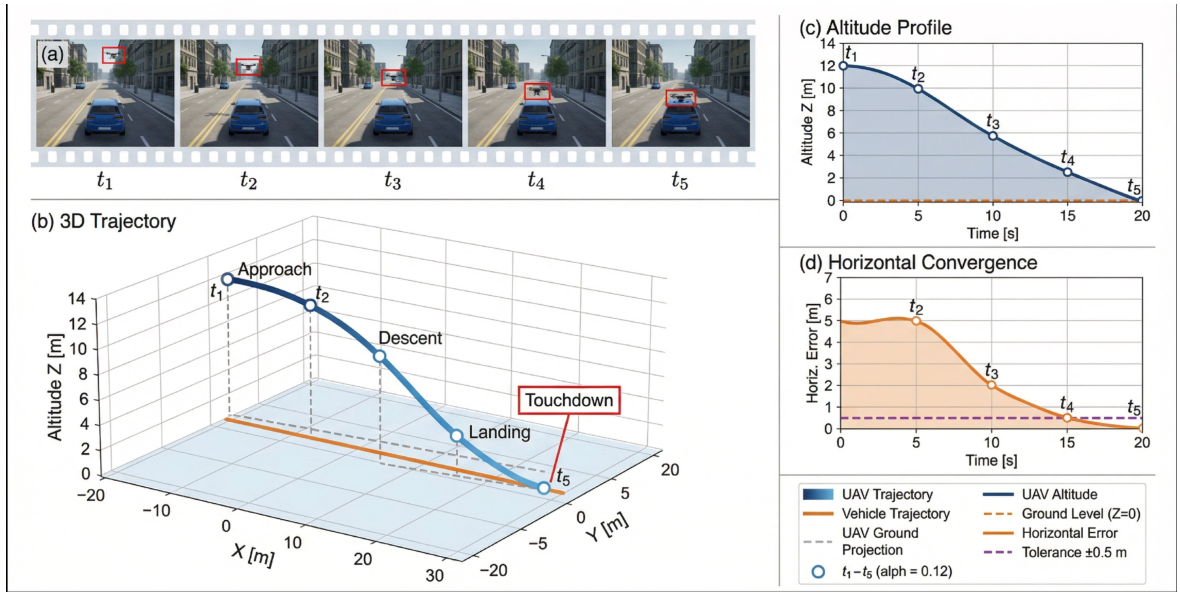
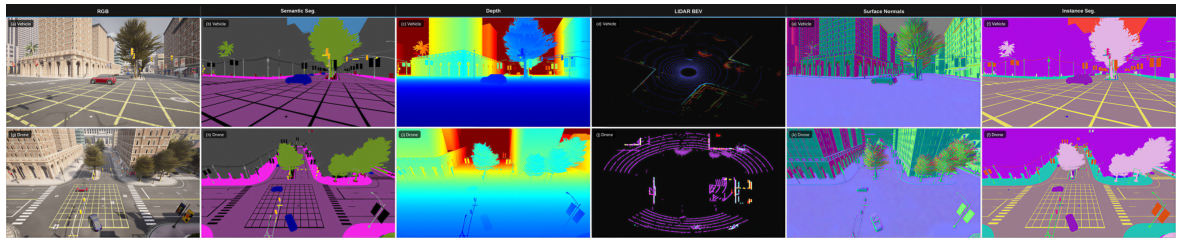
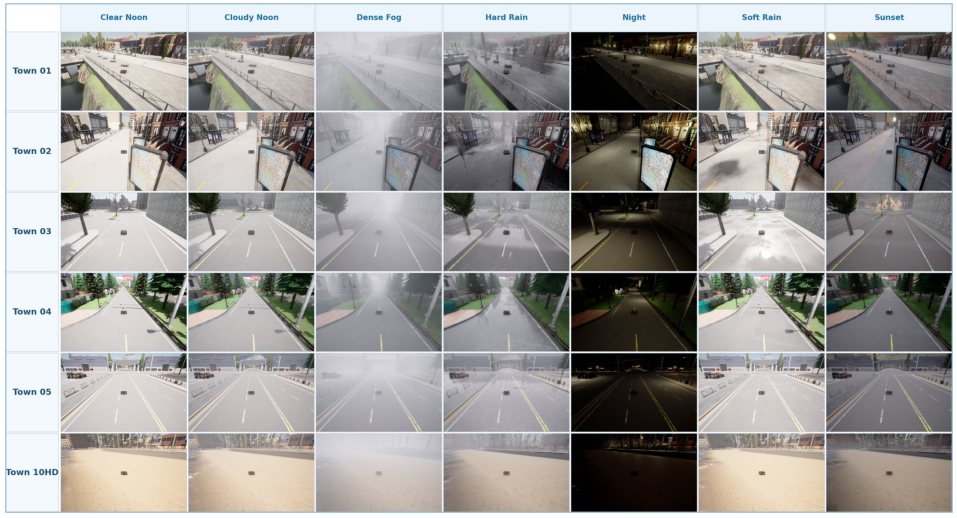
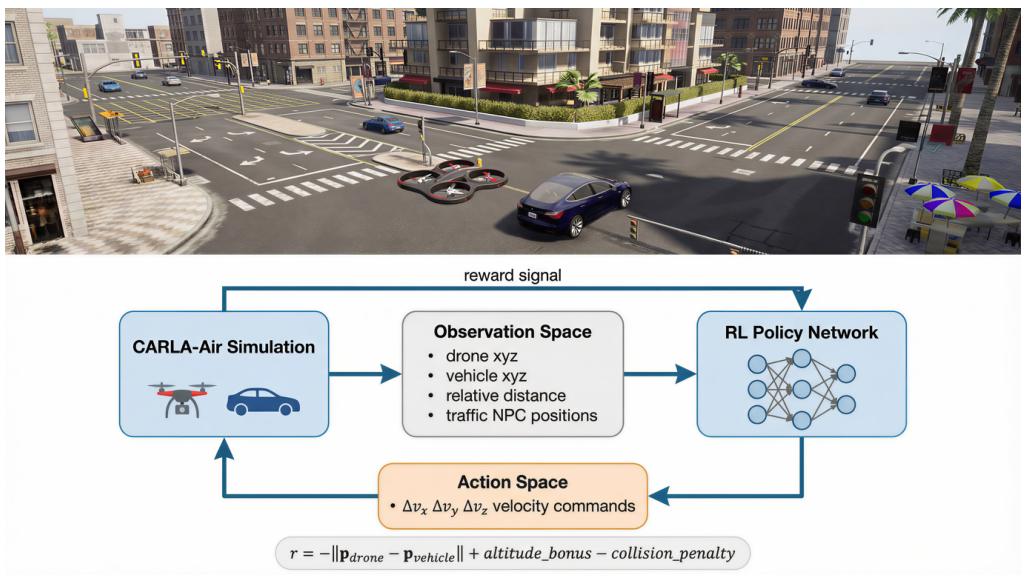
CARLA-Airは、高忠実度の都市走行と物理的に正確なマルチローター飛行を単一のUnreal Engineプロセス内で統合するオープンソースのインフラストラクチャです。CARLAとAirSimの両方のPython APIを維持し、最大18の同期センサーモダリティによる写真のようにリアルなレンダリングを可能にし、多様なシナリオ向けにカスタムアセットのインポートをサポートします。このプラットフォームは、協調的着陸、ビジョン・言語ナビゲーション、マルチモーダルデータセット収集、クロスビュー認識、および強化学習にわたる5つの代表的なアプリケーションワークフローを通じて、性能ベンチマークによって検証されています。
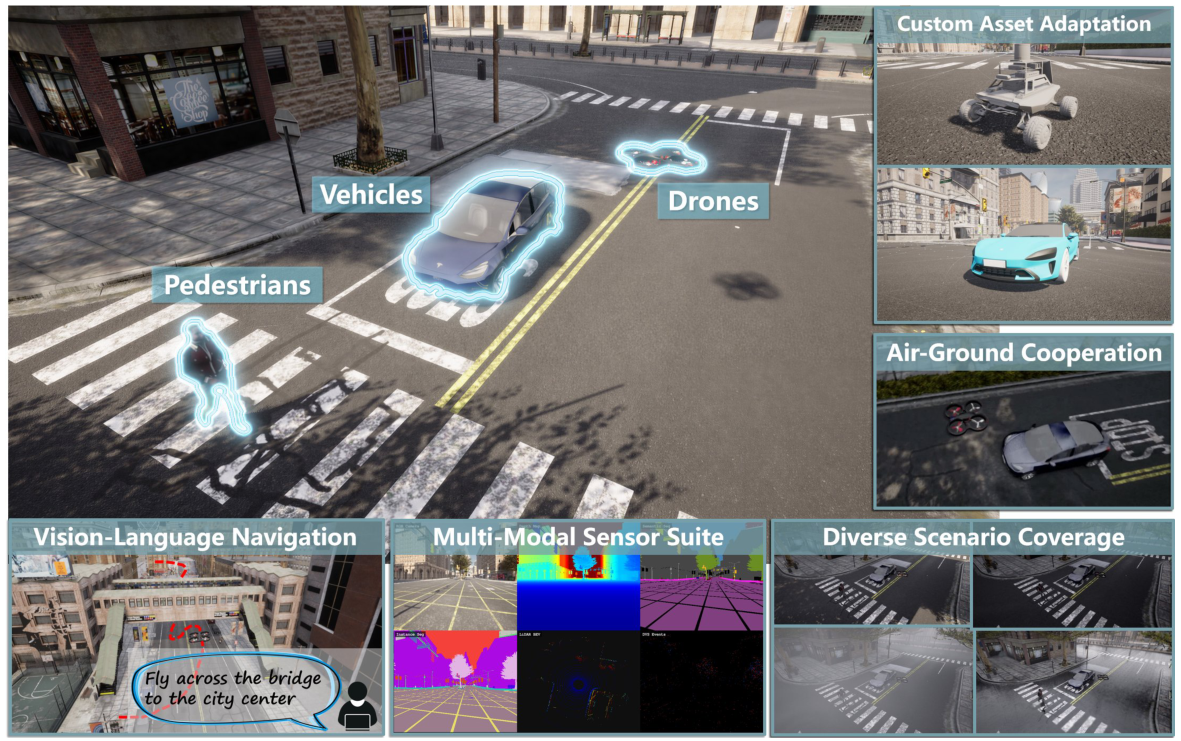
航空・地上エージェント
単一の UE4 プロセス
18 センサー様式
カスタムアセットインポート
オープンソース
アプリケーションワークフロー 5点